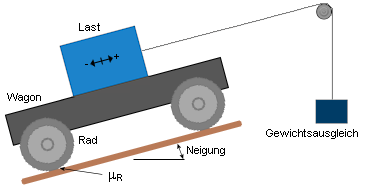
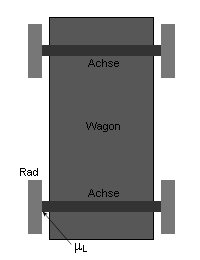
The most common question about the Cart mechanism is how to
configure it for an AGV, which typically has two gear motors each
driving a wheel, along with 2 caster wheels.
Therefore, it has 4 wheels in total with 2 driven wheels, as
configured below.
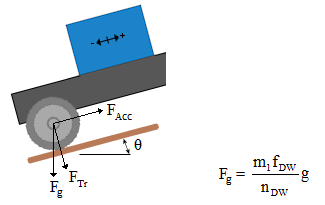
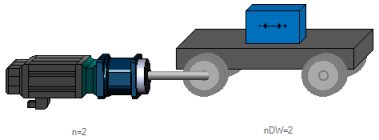
A drive train with two gear motors driving the Cart as shown on
the Main form, with number in parallel, n=2, for the gear motor,
which aligns with the number of driven wheels, nDW=2.
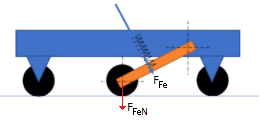
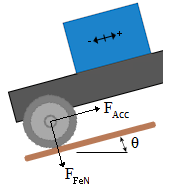
If a gearbox is driving the driven wheels, then often its output
bearing is supporting all forces including the acceleration and
gravity forces. The force due to gravity includes the total mass of
the mechanism including the cart, payload and wheels.
Three component vectors combine to form the total radial load on
the gearbox output bearing:
- Gravity
- Acceleration
- Traction force (if there is a clamping force say for a wheel on
a track to improve traction)
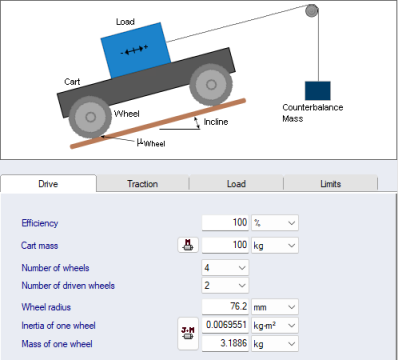
For example, for simple math, assume no friction losses, and the
driven wheels support 100% of the moving mass.
With an incline of 0deg (horizontal), a Cart mass of 100kg, a
Payload of 400kg, and 4 wheels each 3.1886kg, the total mass is
512.75kg, which results in a gravity force (dwonward) of
5,030N.
With an acceleration of 1m/s2, the acceleration force is 512.75N
(horizontal).
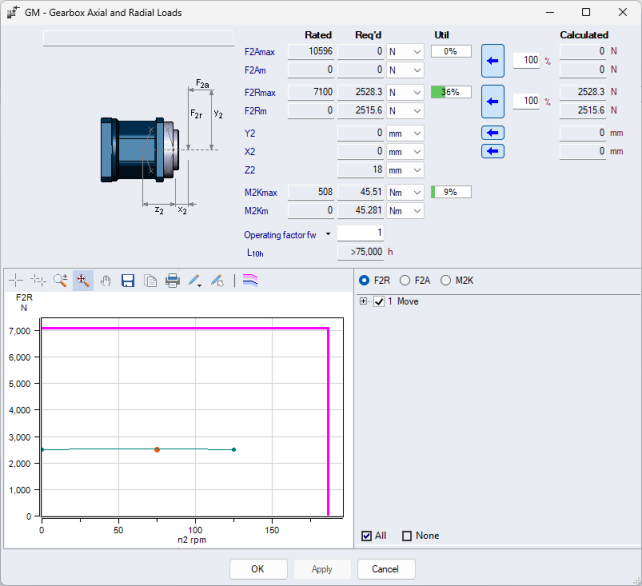
Therefore, these two force vectors combine for SQRT(5030^2 +
512.75^2) = 5,056N total. And since we have 2 driven wheels, then
the max radial force seen at each gearbox output bearing is
5,056N / 2 = 2,528N
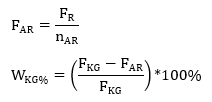
The resulting calculated radial load is shown in the Gearbox
Shaft Loads form.
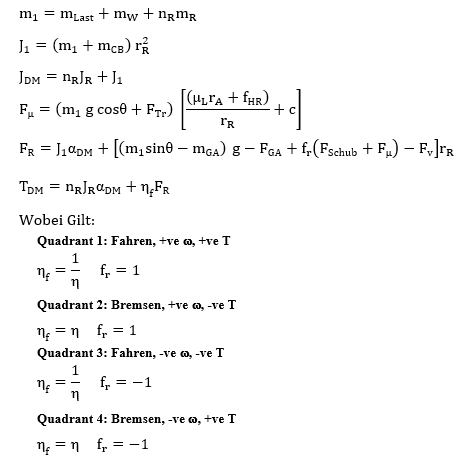
 Reibungskraft
[Fm] aufgrund
von Roll-, Lager- und Hebelarmreibung
Reibungskraft
[Fm] aufgrund
von Roll-, Lager- und Hebelarmreibung
 Häufig
gestellte Fragen
Häufig
gestellte Fragen