Rotierender Motor
|
|
|
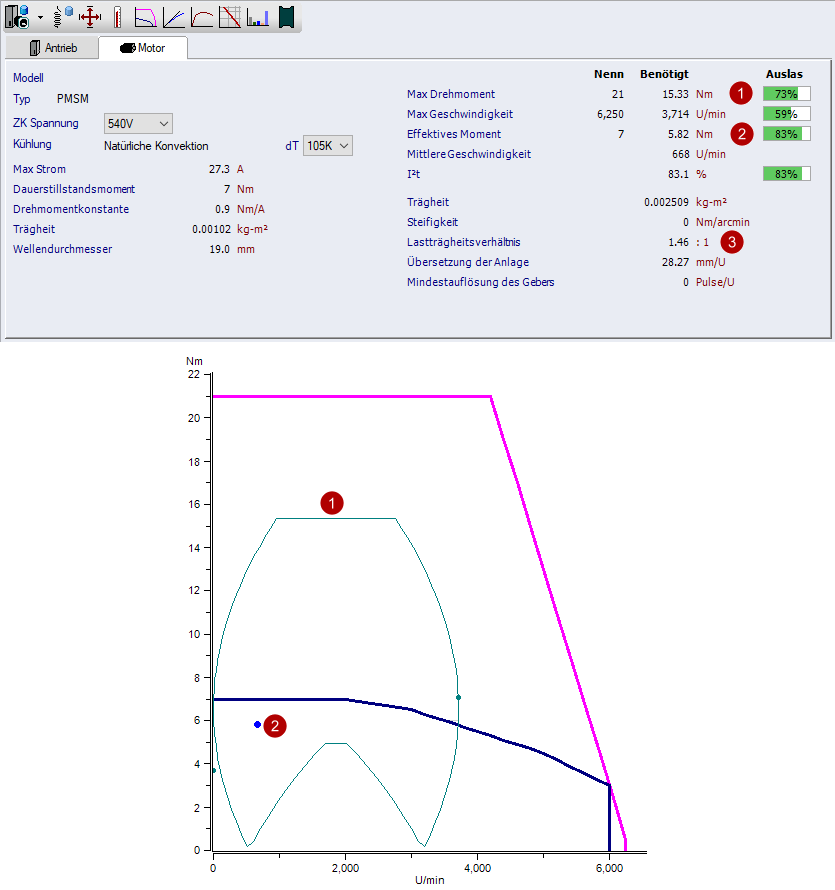
Drehmomentprofil für jede Bewegung Segment |
||||||||||||||||||||||||
|
Effektivdrehmoment Das Effektivdrehmoment ist ein thermisches Äquivalent zum Vergleich mit einem kontinuierlichen thermischen Grenzwert für den Motor.
Aus Gründen der Einfachheit ist im obige Beispiel Ruck nicht
enthalten. Tatsächlich sind die Beschleunigungs- und
Verzögerungsdrehmomentkurven jeweils in viele Proben unterteilt, um
für S-Kurvenprofile eine präzisere Berechnung des
Effektivdrehmoments zu ermöglichen. |
|||||||||||||||||||||||||
|
Trägheit Verschiedenheit Berechnungen Trägheit Verschiedenheit (IM) ist das Verhältnis der Systemlast Trägheit zur Motorrotor Trägheit
Grundlegende Konzepte Faustregeln für Drehzahl gegen Stabilität:
Bei abnehmender Trägheit Verschiedenheit macht die Motorrotor
Trägheit einen höheren Anteil der Systemlast aus. Eine niedrigere
Trägheit Verschiedenheit bietet bessere Stabilität, doch hat dies
seinen Preis. Werden die Lastträgheit und die Bewegungsprofile
konstant gehalten, steigt für einen Motor mit erhöhter
Rotorträgheit die Systemträgheit. Daher sind bei gleichem
Bewegungsprofil zusätzliches Drehmoment und zusätzliche Leistung
zur Beschleunigung und Verzögerung der höheren Systemträgheit
erforderlich. Die höheren Drehmoment- und Leistungsanforderungen
können zur Hochrüstung von Systemkomponenten wie Umrichter,
Ballast-, Einspeisemodul usw. führen. |
|||||||||||||||||||||||||