Load Formula |
| 'Load Formula' is available in the PRO version for the Payload, Thrust & Force/Torque formula, as well as Fr, Fa, rUL and mUL formula for the Rotary mechanism. |
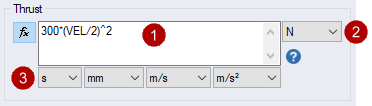
Create a formula to model complex dynamic loads that can be a function of position, distance, velocity, acceleration and time. The table below lists the variables, arithmetic and functions that can be used to create a load formula.
|
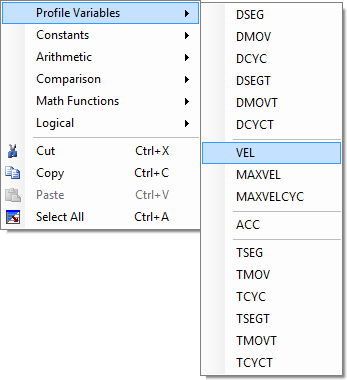
Formula Textbox Right-click in the formula textbox, and a drop down menu appears listing the profile variables, constants, arithmetic, comparisons and math functions. |
|||||||||||||||||
| Units for the formula result | |||||||||||||||||
|
Units for the variables used in the formula
|
1. Create a simple thrust function where thrust is 100 times the square of velocity:
2. Create a Thrust Step Profile using the formula:
Right-click in the formula textbox, and a drop down menu appears listing the profile variables, constants, arithmetic, comparisons and math functions.
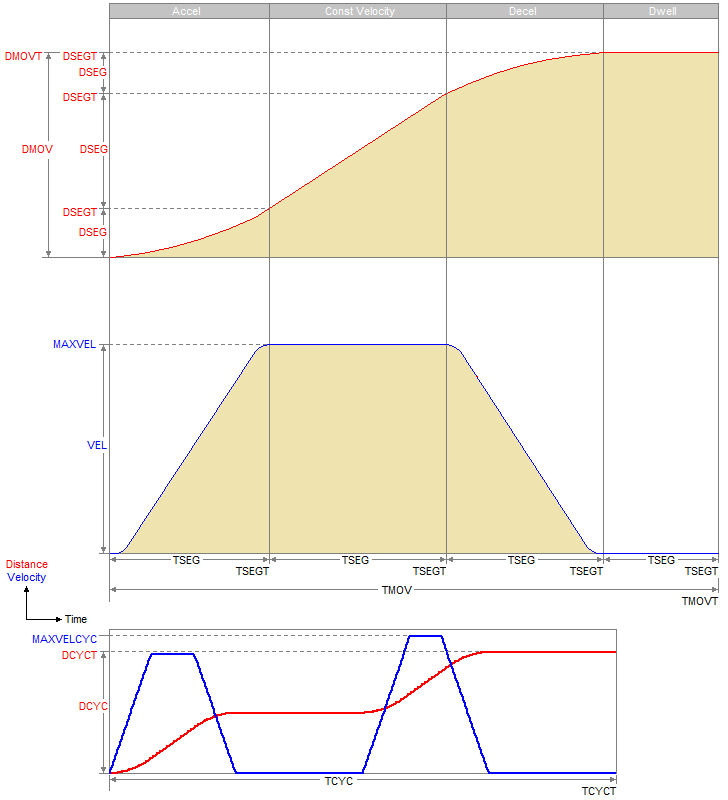
| Profile Variables | Units | |||||||||||||||||||||
| DSEG | Distance in Segment | Linear: m, mm, in Rotary: °, rad, rev |
||||||||||||||||||||
| DMOV | Distance in Move | Linear: m, mm, in Rotary: °, rad, rev |
||||||||||||||||||||
| DCYC | Distance in Cycle/Sequence | Linear: m, mm, in Rotary: °, rad, rev |
||||||||||||||||||||
| DSEGT | Total Segment Distance | Linear: m, mm, in Rotary: °, rad, rev |
||||||||||||||||||||
| DMOVT | Total Move Distance | Linear: m, mm, in Rotary: °, rad, rev |
||||||||||||||||||||
| DCYCT | Total Distance of Cycle/Sequence | Linear: m,mm, in Rotary: °, rad, rev |
||||||||||||||||||||
| VEL | Velocity | Linear: m/s, mm/s, in/s Rotary: °/s, rad/s, rev/s |
||||||||||||||||||||
| MAXVEL | Max Velocity in Segment/Move Always a positive value Ie. MAXVEL = Max(Abs(VEL)) in the Segment/Move |
Linear: m/s, mm/s, in/s Rotary: °/s, rad/s, rev/s |
||||||||||||||||||||
| MAXVELCYC | Max Velocity in Cycle/Sequence Always a positive value Ie. MAXVELCYC = Max(Abs(VEL)) in the Cycle/Sequence |
Linear: m/s, mm/s, in/s Rotary: °/s, rad/s, rev/s |
||||||||||||||||||||
| ACC | Acceleration | Linear: m/s2, mm/s2,
in/s2 Rotary: °/s2, rad/s2, rev/s2 |
||||||||||||||||||||
| TSEG | Time in Segment | s | ||||||||||||||||||||
| TMOV | Time in Move | s | ||||||||||||||||||||
| TCYC | Time in Cycle/Sequence | s | ||||||||||||||||||||
| TSEGT | Total Segment Time | s | ||||||||||||||||||||
| TMOVT | Total Move Time | s | ||||||||||||||||||||
| TCYCT | Total Cycle/Sequence Time | s | ||||||||||||||||||||
| Constants | ||||||||||||||||||||||
| PI | Pi (3.14159265358979...) | |||||||||||||||||||||
| Arithmetic | ||||||||||||||||||||||
| + | Addition | |||||||||||||||||||||
| - | Subtraction | |||||||||||||||||||||
| * | Multiplication | |||||||||||||||||||||
| / | Division | |||||||||||||||||||||
| \ | Integer division | |||||||||||||||||||||
| ^ | Exponentiation (raise to a power of) | |||||||||||||||||||||
| Mod |
Modulus arithmetic
|
|||||||||||||||||||||
| When multiplication and division occur together in an expression, each operation is evaluated as it occurs from left to right. Likewise, when addition and subtraction occur together in an expression, each operation is evaluated in order of appearance from left to right. | ||||||||||||||||||||||
| Comparison | ||||||||||||||||||||||
| = | Equality | |||||||||||||||||||||
| <> | Inequality | |||||||||||||||||||||
| < | Less than | |||||||||||||||||||||
| > | Greater than | |||||||||||||||||||||
| <= | Less than or equal to | |||||||||||||||||||||
| >= | Greater than or equal to | |||||||||||||||||||||
| Is | Object equivalence | |||||||||||||||||||||
|
When the comparison is True, the result value is 1. Eg. (3>2)=1 When the comparison is False, the result value is 0. Eg. (1>2)=0 |
||||||||||||||||||||||
| Math Functions | Units | |||||||||||||||||||||
| Abs | Absolute Eg. Abs(-1)=1 |
|||||||||||||||||||||
| Atn | Arctangent Eg. Atn(1)=PI/4 |
|||||||||||||||||||||
| Cos | Cosine of an angle Eg. Cos(PI/4)=0.707106781... |
[rad] | ||||||||||||||||||||
| Exp | e raised to a power Eg. Exp(1)=e=2.718281828459... |
|||||||||||||||||||||
| Log | Natural logarithm Can be combined to create the Log of any base, n. Eg. Logn(x) = Log(x) / Log(n) |
|||||||||||||||||||||
| Sgn | Sign of a number x>0: Sgn(x)=1, x=0: Sgn(x)=0, x<0: Sgn(x)=-1 |
|||||||||||||||||||||
| Sin | Sine of an angle Eg. Sin(PI/4)=0.707106781... |
[rad] | ||||||||||||||||||||
| Sqr | Square root Eg. Sqr(9)=9^½=3 |
|||||||||||||||||||||
| Tan | Tangent of an angle Eg. Tan(PI/4)=1 |
[rad] | ||||||||||||||||||||
| Int | Integer portion of a number1 | |||||||||||||||||||||
| Fix | Integer portion of a number1 | |||||||||||||||||||||
| 1The difference between Int and Fix is that if number is negative, Int returns the first negative integer less than or equal to number, whereas Fix returns the first negative integer greater than or equal to number. For example, Int converts -8.4 to -9, and Fix converts -8.4 to -8. | ||||||||||||||||||||||
| Logical | ||||||||||||||||||||||
| And | Logical conjunction | |||||||||||||||||||||
| Not | Logical negation | |||||||||||||||||||||
| Or | Logical disjunction | |||||||||||||||||||||
| Xor | Logical exclusion | |||||||||||||||||||||
| Eqv | Logical equivalence | |||||||||||||||||||||
| Imp | Logical implication | |||||||||||||||||||||
| Derived Math Functions | |
| Secant | Sec(X) = 1 / Cos(X) |
| Cosecant | Cosec(X) = 1 / Sin(X) |
| Cotangent | Cotan(X) = 1 / Tan(X) |
| Inverse Sine | Arcsin(X) = Atn(X / Sqr(-X * X + 1)) |
| Inverse Cosine | Arccos(X) = Atn(-X / Sqr(-X * X + 1)) + 2 * Atn(1) |
| Inverse Secant | Arcsec(X) = 2 * Atn(1) – Atn(Sgn(X) / Sqr(X * X – 1)) |
| Inverse Cosecant | Arccosec(X) = Atn(Sgn(X) / Sqr(X * X – 1)) |
| Inverse Cotangent | Arccotan(X) = 2 * Atn(1) - Atn(X) |
| Hyperbolic Sine | HSin(X) = (Exp(X) – Exp(-X)) / 2 |
| Hyperbolic Cosine | HCos(X) = (Exp(X) + Exp(-X)) / 2 |
| Hyperbolic Tangent | HTan(X) = (Exp(X) – Exp(-X)) / (Exp(X) + Exp(-X)) |
| Hyperbolic Secant | HSec(X) = 2 / (Exp(X) + Exp(-X)) |
| Hyperbolic Cosecant | HCosec(X) = 2 / (Exp(X) – Exp(-X)) |
| Hyperbolic Cotangent | HCotan(X) = (Exp(X) + Exp(-X)) / (Exp(X) – Exp(-X)) |
| Inverse Hyperbolic Sine | HArcsin(X) = Log(X + Sqr(X * X + 1)) |
| Inverse Hyperbolic Cosine | HArccos(X) = Log(X + Sqr(X * X – 1)) |
| Inverse Hyperbolic Tangent | HArctan(X) = Log((1 + X) / (1 – X)) / 2 |
| Inverse Hyperbolic Secant | HArcsec(X) = Log((Sqr(-X * X + 1) + 1) / X) |
| Inverse Hyperbolic Cosecant | HArccosec(X) = Log((Sgn(X) * Sqr(X * X + 1) + 1) / X) |
| Inverse Hyperbolic Cotangent | HArccotan(X) = Log((X + 1) / (X – 1)) / 2 |
| Logarithm to base N | LogN(X) = Log(X) / Log(N) |