Optimize Master-Follower |
The Master-Follower feature opens SERVOsoft up to a whole new realm of Optimization - a Complete Power Group. Ie. SERVOsoft optimizes an entire multi-axis machine/robot.
In general, when optimizing the Master, the most common scenario uses the optimization target 'XBase: Time' on a Constant Velocity Master. Effectively, this means the Optimizer works to reduce the Power Group's Cycle Time by increasing the Master Constant Velocity, while meeting all constraints. However, if the Master has a Variable Velocity Sequence, this takes optimization to a much higher level.
| The 'Optimizer PRO' is an option that is only available with the SERVOsoft PRO version, which includes the CAM Profiles feature, essential to take full advantage of the Optimizer. |
 Master:
Constant Velocity Sequence
Master:
Constant Velocity Sequence
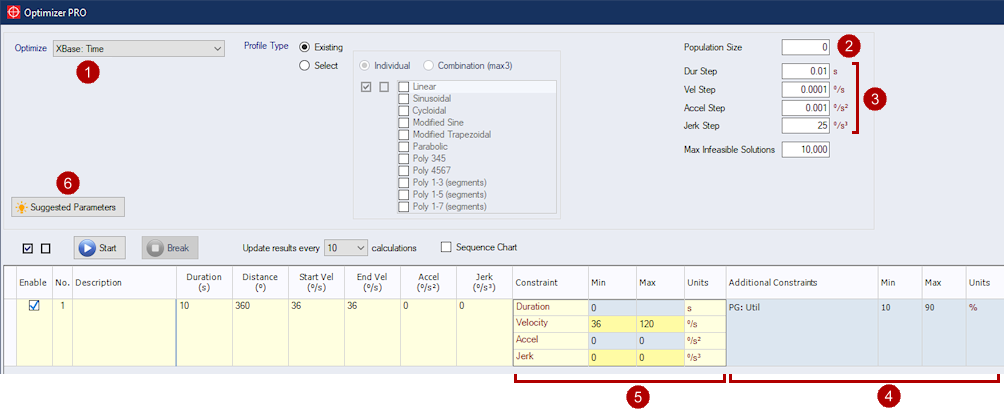
The most common optimization scenario for a Master Follower Constant Velocity application is the following:
|
Optimize = 'XBase: Time'
|
|
|
Algorithm Population Size
|
|
|
Algorithm Step Settings
|
|
|
At least one Additional Constraint is required as the Optimizer needs to push up against a constraint as it works to reduce 'XBase: Time'. The simplest constraint to add is:
|
|
|
The Segment Input Constraints provide the Optimizer the allowed range of values:
|
|
|
Suggested Parameters
|
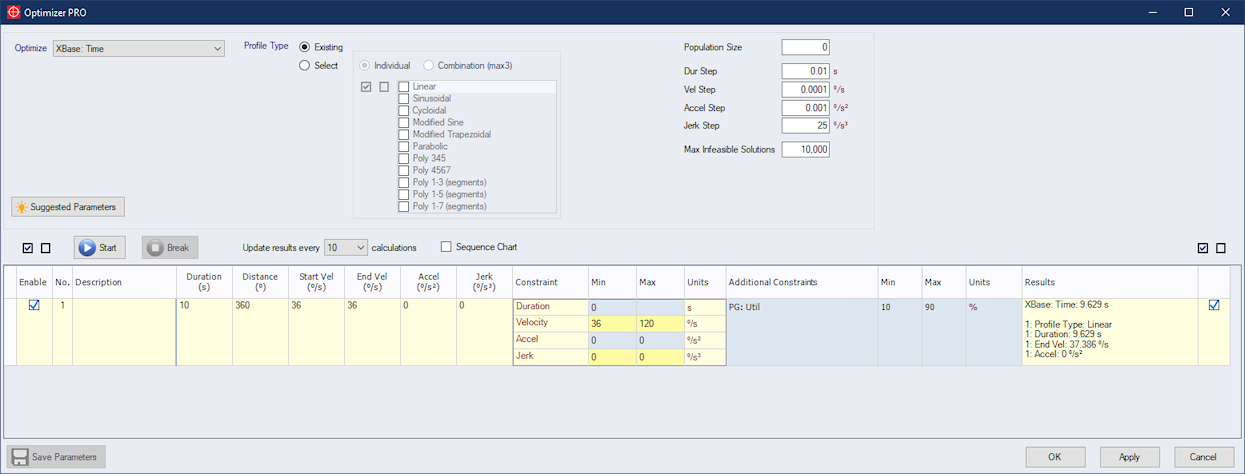
Click Start and in a few seconds the solution is found...
Master:
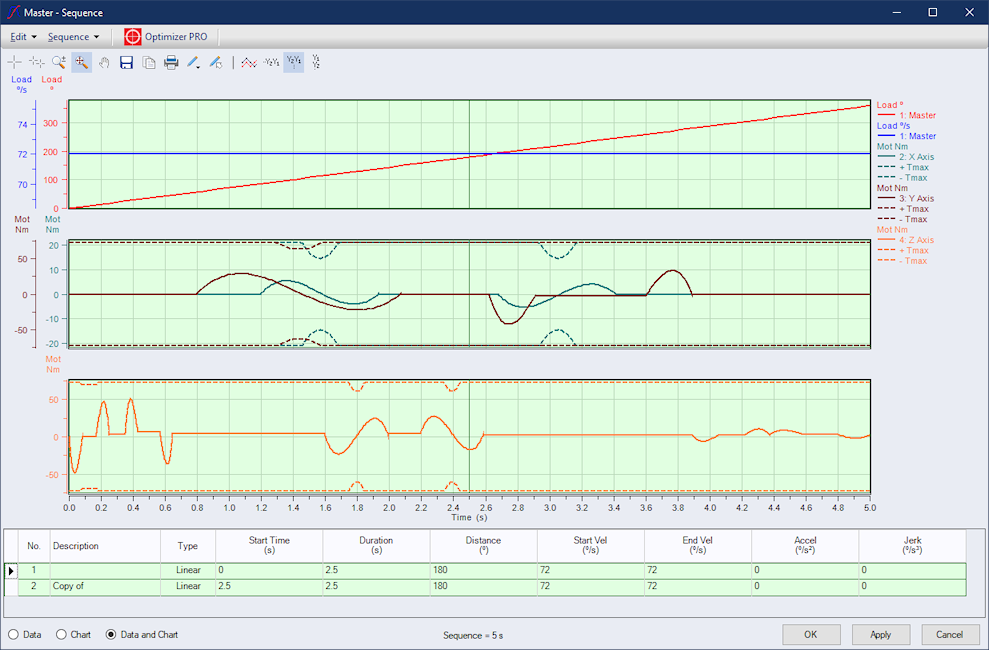
Variable Velocity Sequence
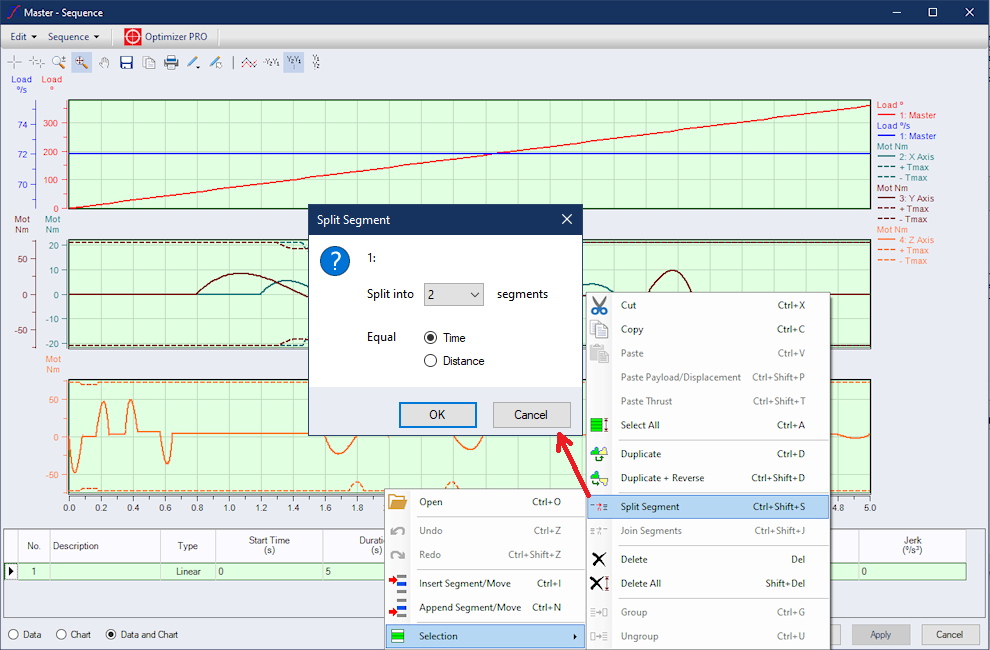
A slightly more sophisticated approach to optimize a multi-axis machine/robot, where the Master is setting the pace, is letting the Master’s velocity vary in a range. With that approach even faster cycle times can be achieved. In order to do so, the Master’s single Constant Velocity segment needs to be split into 2 or more segments. Start by right clicking on the segment and click 'Selection' -> 'Split Segment'.
|
Fewer segments allow the Optimizer to find a solution faster, but with the tradeoff of perhaps not quite as optimal a solution. |
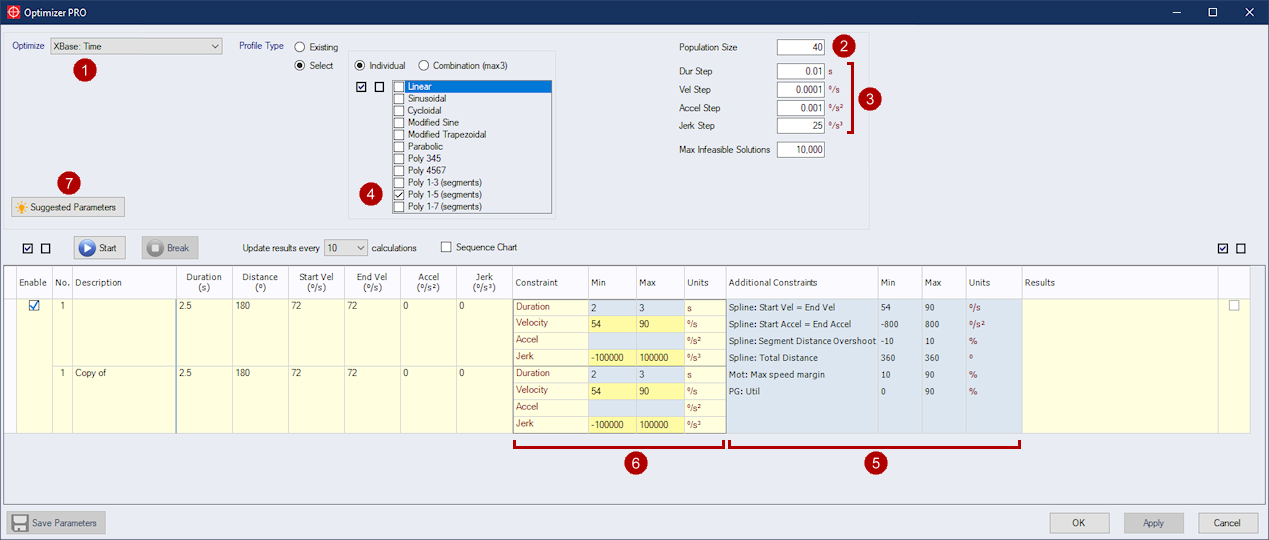
Now with 2 segments, click on the 'Optimizer PRO' button and adjust following settings.
|
Optimize = 'XBase: Time'
|
|
|
Algorithm Population Size
|
|
|
Algorithm Step Settings
|
|
Profile Type = Poly 1-5 (segments)
|
|
|
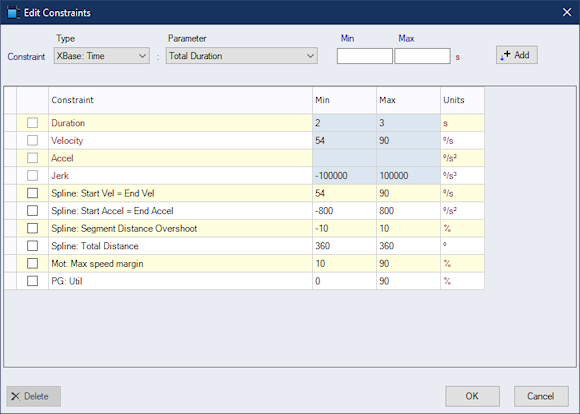
Additional Constraints Double click the 'Additional Constraints' cell to add/edit additional constraints. At least one Additional Constraint is required as the Optimizer needs to push up against a constraint as it works to reduce 'XBase: Time'. The simplest constraint to add is:
|
|
|
The Segment Input Constraints provide the Optimizer the allowed range of values:
|
|
|
Suggested Parameters
|
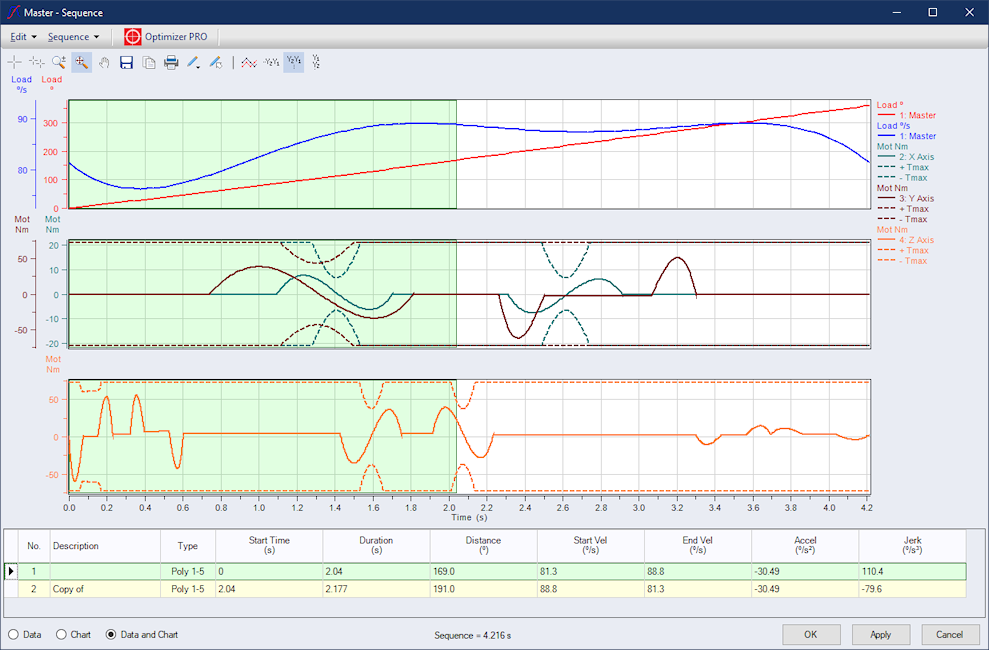
After pressing the 'Start' button the Optimizer appears with a result like this after about a minute:
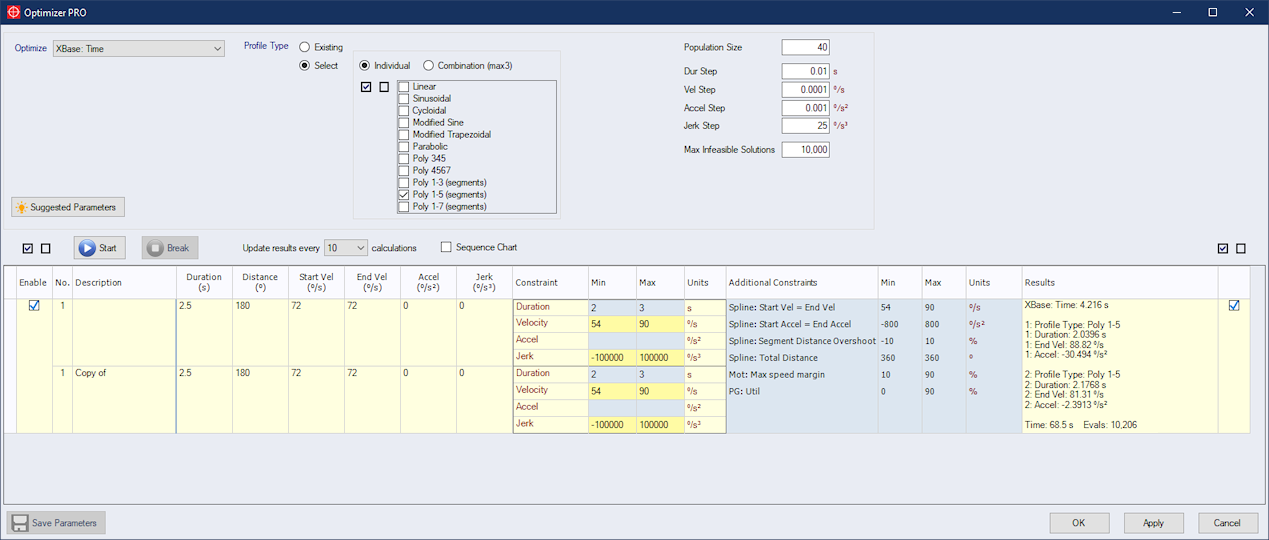
So the cycle time was reduced from 5 sec to 4.2 sec only by varying the Master's velocity, while maintaining all Follower axes positions in relation to the Master's position.