Bewegungsprofil |
 Profilaufschlüsselung
Profilaufschlüsselung
Jedes Profil besteht aus drei Hauptkomponenten:
Die Komponenten Beschleunigung und Verzögerung unterteilen sich weiter in:
Ruck
Ruck ist die zeitliche Änderungsrate der Beschleunigung/Verzögerung. Typische Einheiten sind m/s3 und deg/s3 für lineare bzw. rotierende Anwendungen. Ruck wird häufig verwendet, um Spieleffekte und die mechanische Abnutzung zu minimieren und für ein gleichmäßiges, stabiles Profil mit sauberer Positionierung und Vermeidung von Überschreitung zu sorgen. Ruck ist eine Funktion der mechanischen Steifheit einer Achse und ist vor der korrekten Abstimmung und dem Leistungsvergleich der Achse schwer einzuschätzen. Mit zunehmender Anzahl an Projekten für ähnliche Anwendungen wird es jedoch sehr viel leichter, den zutreffenden Ruckwert für eine Anwendung zu bestimmen.
Hinweis: Durch die Rucklimitierung steigt das erforderliche Spitzendrehmoment des Motors an, was einen größeren Motor und Antrieb erforderlich machen kann.
|
|
|
|
Eine weitere Beschleunigung ist ohne Steigerung des Ruckwertes nicht möglich S-Kurve = 100% |
|
|

|
Ein ideales/theoretisches Profil Geben Sie einen Ruckwert von Null ein S-Kurve = 0% |
S-Kurve
Anstatt einen Ruckwert einzugeben, können Sie die S-Kurve verwenden, die einem Prozentsatz der Beschleunigungszeit laut folgender Formel entspricht:
![]()
Hinweise:
1. Bei
einer S-Kurve = 100% handelt es sich um ein rucklimitertes
Profil.
2. Bei einer S-Kurve = 0% handelt es sich um ein
unendliches Ruckprofil.
Traverse Weg & Positionsfenster
|
Traverse Weg |
Weg geringer als Bewegungsweg |
|
Traverse Zeit |
Zeit, die für die Bewegung durch den Traverse Weg benötigt wird |
|
Positionsfenster |
Weg ab Zielposition |
|
Bewegungszeit |
Zeit, die zum Erreichen des Bewegungshubs abzüglich Positionsfenster benötigt wird |
|
Positionsfenster Zeitersparnis |
Zeitersparnis, wenn Positionsfenster auf Null eingestellt war |
Bewegungsregeln (1/2, 1/3, 1/5
& 1/10 Regeln)
| Regel | Besch Zeit | Konst Geschw Zeit |
Verz Zeit |
|---|---|---|---|
| 1/2 | T/2 | 0 | T/2 |
| 1/3 | T/3 | T/3 | T/3 |
| 1/5 | T/5 | 3T/5 | T/5 |
| 1/10 | T/10 | 4T/5 | T/10 |
T = Zeit Bewegen
Bewegungsregeln Diagramme
| 1/2 Regel |
|---|
|
|
|
t4 = 0 t1+t2+t3 = t5+t6+t7 Niedrigster Beschleunigung- und Verzögerung
|
| 1/3 Regel |
|
|
t1 + t2 + t3 = t4 = t5 + t6 + t7 Niedrigster Spitzenleistung |
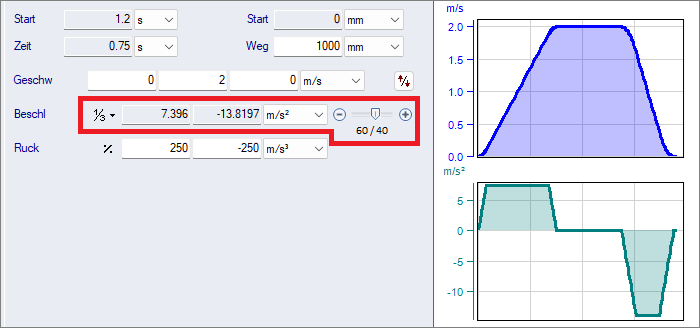
Bewegungsregeln Schiefe
Motion Rule Skewness is the asymmetry of Acceleration vs Deceleration.
The Skewness slider is visible when a Motion Rule is selected.
Below is an example of 1/3 Rule and 60/40 Skewness with Move Time T = 0.75s
Accel + Decel = 2T/3 = 0.5s
Accel = 60% x 0.5s = 0.3s
Decel = 40% x 0.5s = 0.2s
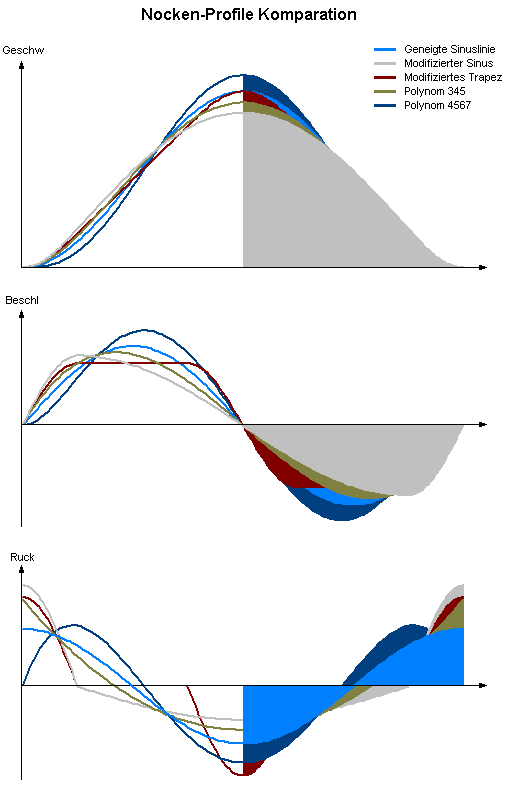
CAM Profil Typ
| Type | Max. Geschw | Max. Beschl | Max. Ruck | Ausführungen |
|---|---|---|---|---|
| Konstant Beschl (1/2 Regel, Kein Ruck) | 2.000 d/t | 4.000 d/t² | unbegrenzt | Niedrigste Beschl, aber unbegrenztruck |
| Trapez Beschl (1/2 Regel, 50% S-Kurve) | 2.000 d/t | 5.333 d/t² | 42.7 d/t³ | Gute Abgleichung der Geschw, Beschl und Niedrigste Ruck |
| Parabel | 1.500 d/t | 6.000 d/t² | 12.0 d/t³ | Niedrigste Geschw, aber hohe Beschl und rauher Ruck |
| Sinus | 1.571 d/t | 4.935 d/t² | unbegrenzt | Niedrigste Geschw, aber unbegrenztruck |
| Modifizierter Sinus Beschl | 1.760 d/t | 5.528 d/t² | 69.5 d/t³ | Niedrige Geschw und gute Beschl, aber höherer Ruck |
| Polynom 345 | 1.875 d/t | 5.773 d/t² | 60.0 d/t³ | Gute Abgleichung der Geschw, Beschl und Ruck |
| Modifiziertes Trapez Beschl | 2.000 d/t | 4.888 d/t² | 61.4 d/t³ | Niedrige Beschl, aber rauher Ruck |
| Geneigte Sinuslinie | 2.000 d/t | 6.283 d/t² | 39.5 d/t³ | Glatte Beschl und Ruck, auch Niedrigste Ruck |
| Sinus² Beschl | 2.000 d/t | 8.000 d/t² | 50.3 d/t³ | Glatte Anfangs- und Endruck, aber höchste Beschl |
| Polynom 4567 | 2.188 d/t | 7.513 d/t² | 52.5 d/t³ | Glatte Ruck, aber hohe Beschl und Geschw |
Wobei gilt:
d = Weg
t = Zeit