Polynome |
Warum haben wir eine solch angeblich komplizierte Funktionalität in SERVOsoft integriert? Die Antwort ist, mit Polynomen können wir nahezu jede Bewegungsaufgabe lösen, und sie stellen eine der Grundlagen des Optimizers dar.
Also lassen Sie uns mit ein bisschen Mathematik beginnen und wir werden bald erkennen, dass wir uns am Ende auf unsere Bewegungsaufgabe und unsere bekannten Variablen Zeit, Weg, Geschwindigkeit, Beschleunigung, Ruck usw. konzentrieren können, wobei alle notwendigen Berechnungen automatisch von SERVOsoft ausgeführt werden.Ein Polynom (n-ter Ordnung) ist eine mathematische Funktion der Form
![]()
Oft wird der Begriff "Polynom" mit "Poly" abgekürzt, und die Bezeichner werden mit "Poly 1-3", "Poly 1-5" und "Poly 1-7" abgekürzt. Polynome 345 und 4567 sind Teilmengen der vollständigen Polynome mit den ersten Termen auf Null gesetzt. Poly 345 und 4567, welche schon von Anfang an in SERVOsoft Verwendung finden, sind 'Rampen'-Profile, bei welchen Start- und Endbeschleunigungswerte immer Null sind.
Poly 1-5 und Poly 1-7, welche auch diese ersten Terme enthalten, sind wesentlich flexibler. Zum Beispiel kann der Anwender beim Poly 1-5 sowohl die Start- und Endgeschwindigkeit als auch die Start- und Endbeschleunigung vorgeben. Und beim Poly 1-7 kann der Anwender auch noch die Start- und Endruckwerte festlegen.
Bei n = 5 oder 7 wird das Polynom auch als "Polynom 5. Grades" oder "Polynom 7. Grades" bezeichnet. Weil SERVOsoft auch die 'Rampen'-Polynome 345 und 4567 verwendet, werden durch diese Namenskonvention eindeutig die verwendeten Terme angezeigt. D.h. man hat entweder "Poly 345", welches das 'Rampen'-Profil bezeichnet, oder "Poly 12345", welches alle Terme enthält.
Aber fangen wir einfach an, das Polynom 1. Grades ist gemeinhin als Gerade bekannt
![]()
Wenn wir x als Zeit und p(x) als Verfahrweg betrachten, dann sieht ein Segment zum Beispiel so aus
| mit | und |
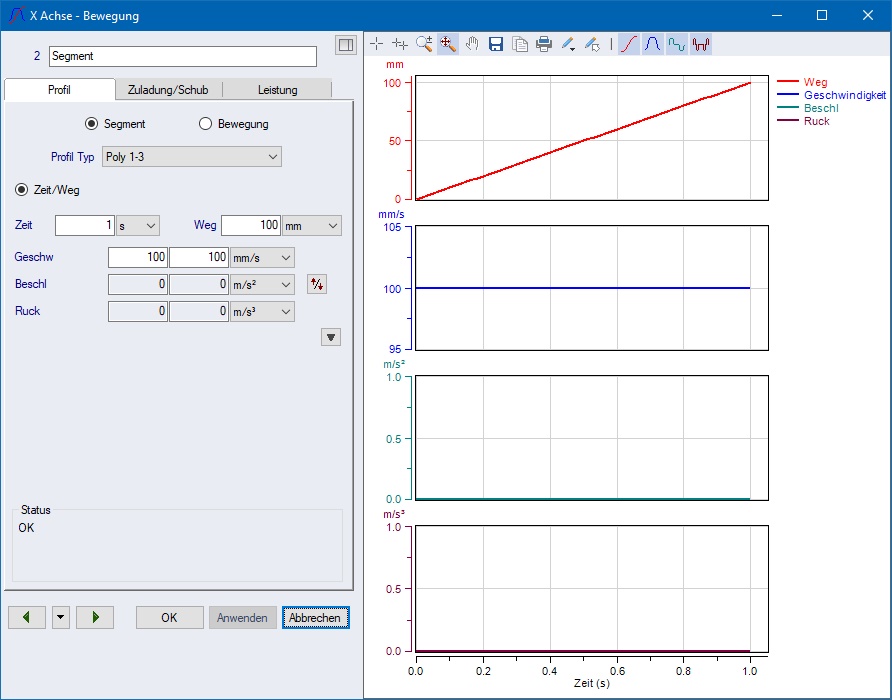
Aber wie Sie sehen können wird das Segment in SERVOsoft als
Polynom 123, was ein Polynom 3.
Ordnung![]() bedeutet, mit den vier Variablen
Zeit, Weg,
Start- und Endgeschwindigkeit
definiert.
bedeutet, mit den vier Variablen
Zeit, Weg,
Start- und Endgeschwindigkeit
definiert.
Aber wie kommt es, dass so unsere Gerade definiert wird? Nun
zunächst, wenn wir uns mit einem Polynom 3. Ordnung beschäftigen,
müssen wir herausfinden, welche Werte die vier unbekannten
Koeffizienten ![]() haben.
haben.
Erinnern wir uns an unseren Lineare Algebra-Unterricht, dann brauchen wir vier Gleichungen, um ein Gleichungssystem mit vier Unbekannten zu lösen (und wir können die Einheiten jeweils weglassen):
| (G1, d.h. wir starten bei |
||
| (G2, d.h. der Verfahrweg in |
||
| (G3, d.h. die Startgeschwindigkeit beträgt |
||
| (G4, d.h. die Endgeschwindigkeit beträgt |
Führen wir es einmal im Detail aus (beachten Sie dabei, dass wir in
jeder neuen Zeile die Ergebnisse der vorangegangenen Zeilen schon
berücksichtigen):
| (G1) | |||||||
| (G3) | |||||||
| (G2) | (eqn2a) | ||||||
| (G4) | (eqn4a) |
3 * (eqn2a) –
(eqn4a) -> ![]() und mit
(eqn2a) ->
und mit
(eqn2a) -> ![]()
Und es kommt heraus ![]() , und das ist die
Gleichung unserer eindeutigen Geraden.
, und das ist die
Gleichung unserer eindeutigen Geraden.
Dies führt uns zu unserem ersten Satz, der unser Leben beim Umgang mit Polynomen sehr vereinfachen wird. Denn in der Linearen Algebra gilt: Um ein Gleichungssystem mit einer Anzahl Unbekannter zu lösen benötigt man dieselbe Anzahl an Gleichungen, d.h. für eine Polynom 3. Ordnung mit vier unbekannten Koeffizienten werden wir vier Gleichungen, oder allgemein gesprochen Randbedingungen, benötigen.
Ein Polynom n-ter Ordnung ist eindeutig durch n+1 Randbedingungen bestimmt
Dieser Satz besagt, dass wir nichts über Koeffizienten zu wissen brauchen. Wir müssen nur unsere Anwendung und ihre Randbedingungen kennen, um Polynomsegmente zu definieren, die benötigten mathematischen Berechnungen werden alle von SERVOsoft automatisch gemacht:
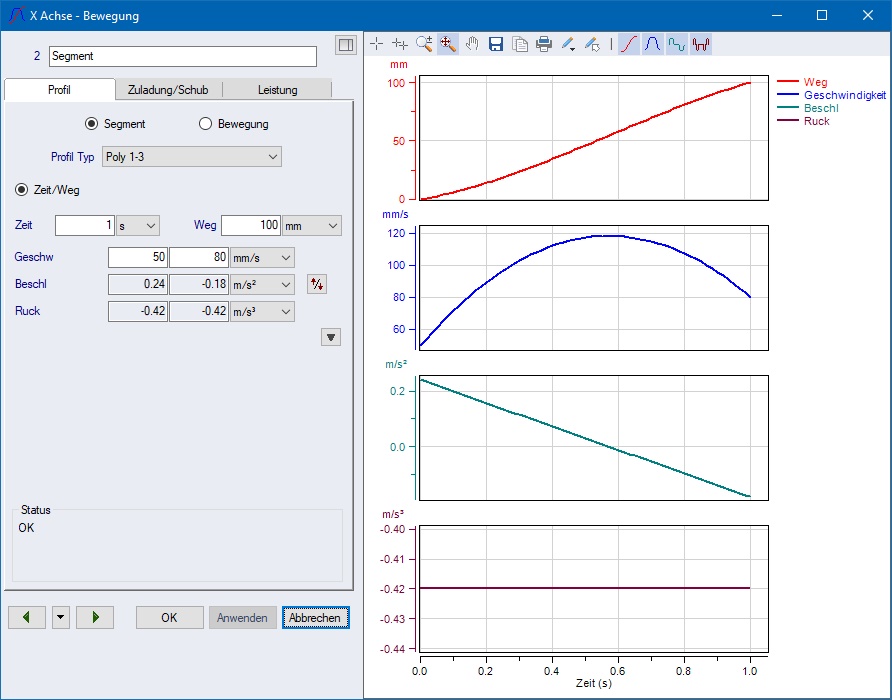
Zum Beispiel sieht ein Polynom 3. Ordnung mit den
vier vorgegebenen Werten Zeit = 1 s, Weg =
100 mm, Startgeschwindigkeit = ![]() und
Endgeschwindigkeit =
und
Endgeschwindigkeit = ![]() eindeutig so aus:
eindeutig so aus:
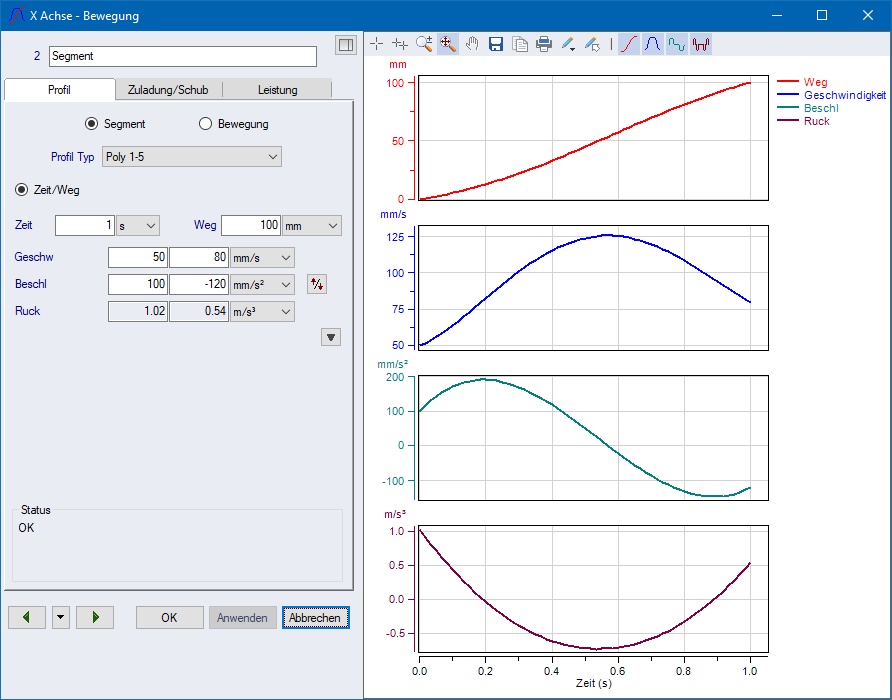
Ein Polynom 5. Ordnung mit den sechs
vorgegebenen Werten Zeit = 1 s, Weg = 100 mm,
Startgeschwindigkeit = ![]() ,
Endgeschwindigkeit =
,
Endgeschwindigkeit = ![]() ,
Startbeschleunigung =
,
Startbeschleunigung = ![]() und
Endbeschleunigung =
und
Endbeschleunigung = ![]() eindeutig
so aussehen:
eindeutig
so aussehen:
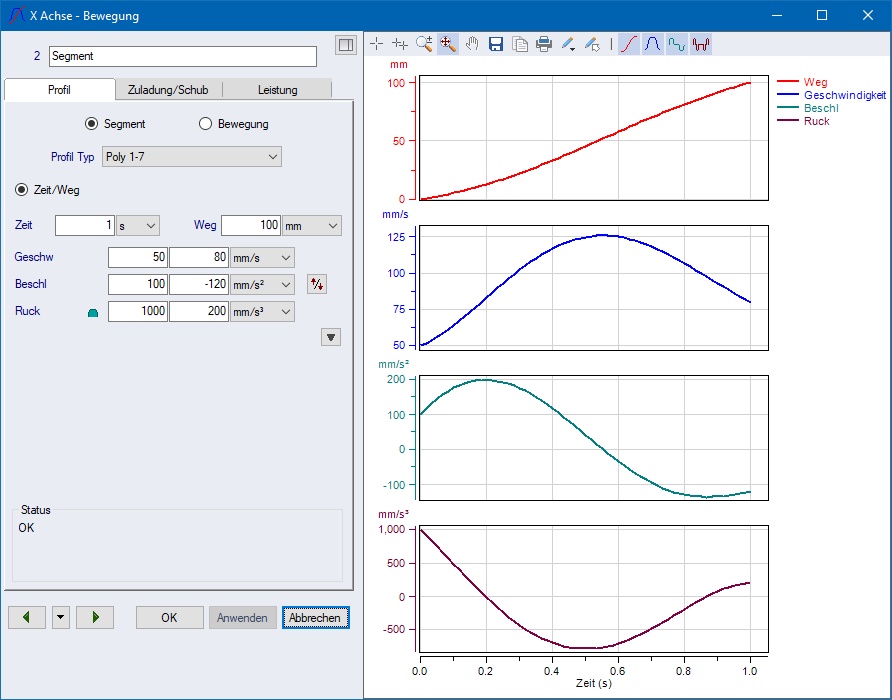
Ein Polynom 7. Ordnung mit den acht
vorgegebenen Werten Zeit = 1 s, Weg = 100 mm,
Startgeschwindigkeit = ![]() ,
Endgeschwindigkeit =
,
Endgeschwindigkeit = ![]() ,
Startbeschleunigung =
,
Startbeschleunigung = ![]() ,
Endbeschleunigung =
,
Endbeschleunigung = ![]() ,
Startruck =
,
Startruck = ![]() und
Endruck =
und
Endruck = ![]() wird
eindeutig so aussehen:
wird
eindeutig so aussehen: