Randbedingungen sind die Min-und Max-Werte des Bereichs
zulässiger Werte.
Es gibt zwei Arten von Randbedingungen, nämlich für Eingangs-
und für Ausgangsgrößen. Eingangsrandbedingungen sind Begrenzungen
der Werte der Eingangsvariablen, das sind die
Bewegungsprofilvariablen Zeit, Geschwindigkeit, Beschleunigung und
Ruck. Muss z.B. die Geschwindigkeit zwischen 1 m/s und 2 m/s
begrenzt werden, dann wird der Optimizer auch nur in diesem
Geschwindigkeitsbereich mit den Werten „spielen“.
Eine Ausgangsrandbedingung ist die Begrenzung des Bereichs
akzeptabler Ergebniswerte. Zum Beispiel ist das maximale
Motor-Drehmoment das „Ergebnis“ der jeweiligen Berechnung aus den
Bewegungsprofil-Eingangsvariablen. Eine typische
Ausgangsrandbedingung hier könnte z.B. sein, das maximale
Motor-Drehmoment auf sagen wir 100 Nm zu begrenzen.
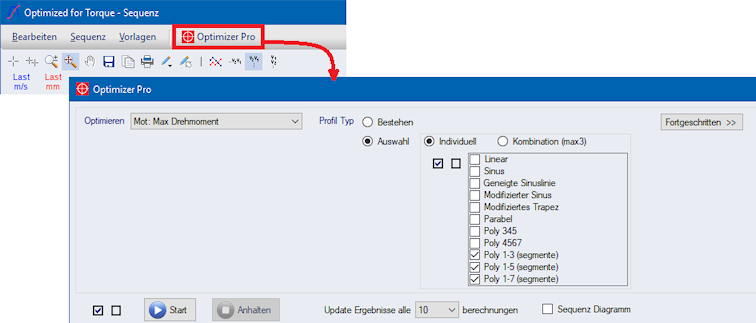
Es können zu den Standard-Eingangsrandbedingungen Zeit,
Geschwindigkeit, Beschleunigung und Ruck, auch zusätzliche
Randbedingungen auf eine oder mehrere Bewegungen / Segmente /
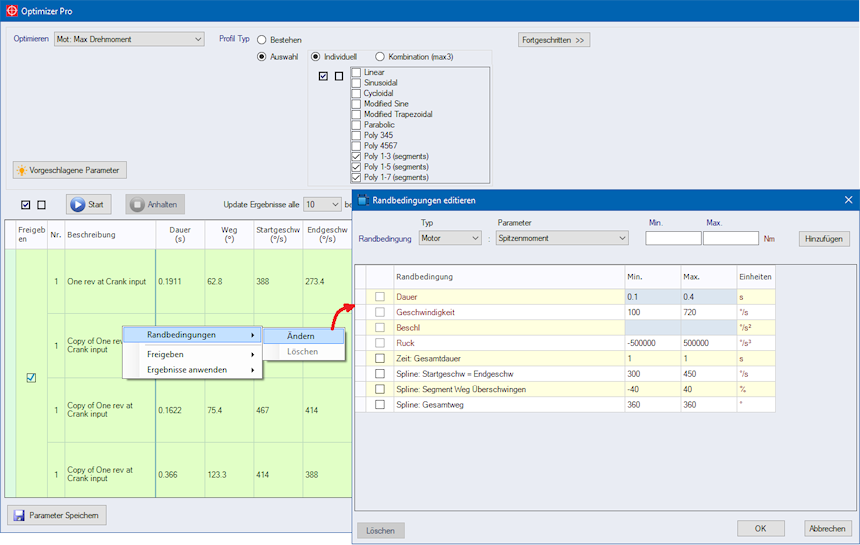
Gruppen angewendet werden. Zum Öffnen des Formulars
„Randbedingungen editieren“ selektieren Sie zuerst eine oder
mehrere Bewegungen / Segmente / Gruppen und wählen dann mit der
rechten Maustaste „Randbedingungen > Ändern“ wie abgebildet aus.
Hier können Sie Randbedingungen wie Motor-Spitzendrehmoment ,
effektives Motor-Reservedrehmoment, Umrichter-Spitzenleistung, etc.
hinzufügen. Beim Klicken der OK-Schaltfläche werden die
Randbedingungen auf alle ausgewählten Bewegungen / Segmente /
Gruppen angewendet.
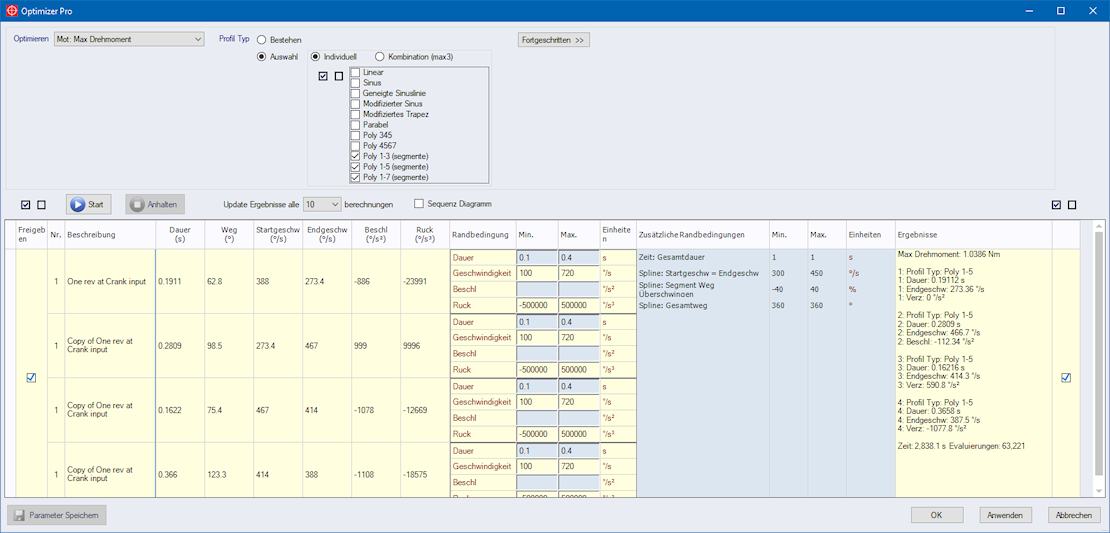
Die Ausgangsrandbedingungen werden mit ihren Min &
Max-Zellen hellblau hinterlegt dargestellt ##### .
Bei den Ausgangsrandbedingungen haben Sie auch die Möglichkeit,
deren Begrenzungen offen zu lassen, indem Sie einfach die Min-und
Max-Werte, wie für die Beschleunigungswerte unten dargestellt, leer
lassen.
| Randbedingung |
|
Einheiten1 |
|
Beschreibung |
|
Segment/Bewegung
|
| |
Dauer
|
|
m/s | °/s |
|
Zulässiger Bereich für die Segment- / Bewegungsdauer
(Beinhaltet nicht die Verweilzeit des Umzugs)
|
| |
Geschwindigkeit
|
|
m/s |
°/s |
|
Zulässiger Bereich für die
Segment- / Bewegungsgeschwindigkeit |
| |
Beschl
|
|
m/s2 |
°/s2 |
|
Zulässiger Bereich für das Segment / Verschieben
Beschleunigen / Verzögern |
| |
Ruck
|
|
m/s3 | °/s3 |
|
Zulässiger Bereich für den
Segment- / Bewegungsruck |
|
Zeit2
|
| |
Gesamtdauer
|
|
s |
|
Zulässiger Bereich für die Segmentgruppe
Gesamtdauer |
|
Spline2
|
| |
Startgeschw
|
|
m/s | °/s |
|
Zulässiger Bereich für die Segmentgruppe
Startgeschwindigkeit |
| |
Endgeschw
|
|
m/s |
°/s |
|
Zulässiger Bereich für die
Segmentgruppe Endgeschwindigkeit |
| |
Startgeschw = Endgeschw
|
|
m/s | °/s |
|
Sicherstellen dass die Segmentgruppe
Startgeschwindigkeit gleich der Segmentgruppe
Endgeschwindigkeit |
| |
Startbeschl
|
|
m/s2 | °/s2 |
|
Zulässiger Bereich für die
Segmentgruppe Startbeschleunigung
Gilt nur für Typen Profile Polynomial 1-5 und 1-7
Wenn nicht angegeben, ist Startbeschl 0 |
| |
Endbeschl
|
|
m/s2 |
°/s2 |
|
Zulässiger Bereich für die Segmentgruppe
Endbeschleunigung
Gilt nur für Typen Profile Polynomial 1-5 und 1-7
Wenn nicht angegeben, ist Endbeschl 0 |
| |
Startbeschl = Endbeschl
|
|
m/s2 | °/s2 |
|
Sicherstellen dass die
Segmentgruppe Startbeschleunigung gleich der Segmentgruppe
Endbeschleunigung
Gilt nur für Typen Profile Polynomial 1-5 und 1-7 |
| |
Startruck
|
|
m/s3 |
°/s3 |
|
Zulässiger Bereich für die Segmentgruppe
Startruck
Gilt nur für Profiltyp Polynom 1-7
Wenn nicht angegeben, ist Startruck 0 |
| |
Endruck
|
|
m/s3 | °/s3 |
|
Zulässiger Bereich für die
Segmentgruppe Endruck
Gilt nur für Profiltyp Polynom 1-7
Wenn nicht angegeben, ist Endruck 0 |
| |
Startruck = Endruck
|
|
m/s3 |
°/s3 |
|
Sicherstellen dass die Segmentgruppe Startruck
gleich der Segmentgruppe Endruck
Gilt nur für Profiltyp Polynom 1-7 |
| |
Gesamtweg |
|
m | ° |
|
Zulässiger Bereich für die
Segmentgruppe Gesamtweg |
| |
Verfahrbereich
|
|
m | ° |
|
Verfahrbereich für die Gruppe. Können gleich oder
größer als die Segmentgruppe, Verfahrweg, wenn für Überschwingen
zulassen möchten. |
| |
Segment Weg Überschwingen
|
|
% |
|
Prozentbereich der Überschreitung für jedes Segment in der
Gruppe. Auf 0 gesetzt, wenn für alle Segmente in der Gruppe kein
Überschwingen erlaubt.
Beispiel:
Segment Entfernung = 100mm
Verfahrgeschwindigkeit Overshoot = Min:-10% und Max:+5%
Dann wird das Segment erlaubt Entfernung = 90mm bis
105mm
|
|
Mechanismus
|
| |
Util
|
|
% |
|
Zulässiger Bereich für die Mechanismus
Utilization |
| |
Max Moment/Kraft Reserve
|
|
% |
|
Zulässiger Bereich für die Mechanismus Max
Moment/Kraft Reserve |
| |
Max. Geschwindigkeitsreserve
|
|
% |
|
Zulässiger Bereich für die Mechanismus Max.
Geschwindigkeitsreserve |
|
Transformation3
|
| |
Util
|
|
% |
|
Zulässiger Bereich für die Transformation
Utilization |
| |
Max Moment
|
|
Nm |
|
Zulässiger Bereich für die
Transformation Max Ausgangsmoment |
| |
Max Moment Reserve
|
|
% |
|
Zulässiger Bereich für die Transformation Max
Ausgangsmoment Reserve |
| |
Nennmoment Reserve
|
|
% |
|
Zulässiger Bereich für die
Transformation Nennausgangsmoment Reserve |
| |
Max. Geschwindigkeitsreserve
|
|
% |
|
Zulässiger Bereich für die Transformation Max.
Geschwindigkeitsreserve |
|
Motor
|
| |
Util
|
|
% |
|
Zulässiger Bereich für die Motor Utilization |
| |
Spitzen Moment/Kraft
|
|
Nm |
N |
|
Zulässiger Bereich für die Motor
Spitzen Moment/Kraft |
| |
Spitzen Moment/Kraft Reserve
|
|
% |
|
Zulässiger Bereich für die Motor Spitzen
Moment/Kraft Reserve |
| |
Effektives Moment/Kraft
|
|
Nm |
N |
|
Zulässiger Bereich für die Motor
Effektives Moment/Kraft |
| |
Effektives Moment/Kraft Reserve
|
|
% |
|
Zulässiger Bereich für die Motor Effektives
Moment/Kraft Reserve |
| |
I2t
|
|
% |
|
Zulässiger Bereich für die Motor
It2 thermisches Überlastungsmodell |
| |
Max Geschwin
|
|
rpm | m/s |
|
Zulässiger Bereich für die Motor Max Geschwin |
| |
Max. Geschwindigkeitsreserve
|
|
% |
|
Zulässiger Bereich für die Motor
Max. Geschwindigkeitsreserve |
|
Umrichter
|
| |
Util
|
|
% |
|
Zulässiger Bereich für die Umrichter
Utilization |
| |
Spitzenstrom
|
|
A |
|
Zulässiger Bereich für die
Umrichter Spitzenstrom |
| |
Spitzenstrom Reserve
|
|
% |
|
Zulässiger Bereich für die Umrichter Spitzenstrom
Reserve |
| |
Dauerstrom
|
|
A |
|
Zulässiger Bereich für die
Umrichter Dauerstrom |
| |
Dauerstrom Reserve
|
|
% |
|
Zulässiger Bereich für die Umrichter Dauerstrom
Reserve |
| |
Ixt
|
|
% |
|
Zulässiger Bereich für die
Umrichter Ixt thermisches Überlastungsmodell |
| |
Spitzenleistung
|
|
W |
|
Zulässiger Bereich für die Umrichter
Spitzenleistung |
| |
Dauerleistung (Wirkungsgrad)
|
|
W |
|
Zulässiger Bereich für die
Umrichter Dauerleistung |
|
Einspeisung
|
| |
Util
|
|
% |
|
Zulässiger Bereich für die Einspeisung
Utilization |
| |
Spitzenleistung Reserve
|
|
% |
|
Zulässiger Bereich für die
Einspeisung Spitzenleistung Reserve |
| |
Ausgangsspitzenleistung Reserve
|
|
% |
|
Zulässiger Bereich für die Einspeisung
Ausgangsspitzenleistung Reserve |
| |
Spitzenrückspeiseleistung Reserve
|
|
% |
|
Zulässiger Bereich für die
Einspeisung Spitzenrückspeiseleistung Reserve |
| |
Dauerleistung Reserve
|
|
% |
|
Zulässiger Bereich für die Einspeisung
Dauerleistung Reserve |
| |
Pxt
|
|
% |
|
Zulässiger Bereich für die
Einspeisung Pxt thermisches Überlastungsmodell |
|
Ballast
|
| |
Util
|
|
% |
|
Zulässiger Bereich für die Einspeisung Ballast
Utilization |
| |
Spitzenleistung Reserve
|
|
% |
|
Zulässiger Bereich für die
Einspeisung Spitzenleistung Reserve |
| |
Dauerleistung Reserve
|
|
% |
|
Zulässiger Bereich für die Einspeisung
Dauerleistung Reserve |
| |
Bxt
|
|
% |
|
Zulässiger Bereich für die
Einspeisung Bxt thermisches Überlastungsmodell |
|
Leistungsgruppe
|
| |
Util
|
|
% |
|
Zulässiger Bereich für die Leistungsgruppe
Utilization |
 Wie
funktioniert der Optimizer?
Wie
funktioniert der Optimizer?