Use Curve Fitting to build an acceleration/deceleration ramp
that is as fast as possible within rated limits that you specify.
Curve Fitting starts with a single motion segment with its start
and end velocity, and then shapes the motion profile at the load
such that the application profile "curve fits" to one or more
rated curves. The result is an acceleration/deceleration ramp that
is as fast as possible within the specified rated curve margins. A
Move can also be "Curve Fitted", with an option to fill in the
constant velocity segment to maintain the original move
distance.
- Curve Fitting is part of the Optimizer PRO option
- Curve Fitting supports the Slider Crank, so long as the
move/segment does not come too close to, or cross over, the fully
extended or fully retracted position. In this case, use the
Optimizer PRO with target 'Motor Peak Torque Margin'.
- When curve fitting a Move, Curve Fitting may struggle with
dynamic gearing mechanisms such as the Slider Crank and CAM Rotary,
because the Constant Velocity segment is set to achieve the
original move distance, and not curve fitted like the Accel and
Decel ramps. In this case, use the Optimizer PRO with target 'Motor
Peak Torque Margin'.
|
In the Sequence form, right-click on a single
acceleration/deceleration ramp segment and select "Create Curve Fit
Spline".
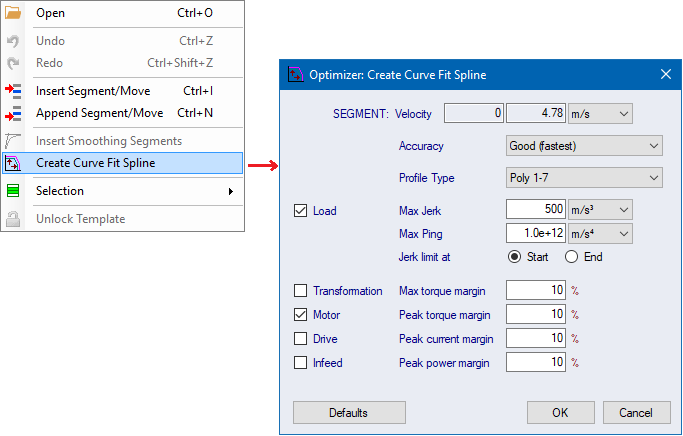
In the this example, a motor accelerates a conveyor mechanism
from 0 to 4.78m/s (2,871rpm). Specify the motor peak torque margin
and jerk limit and click OK.
The calculation run begins, and in this example takes about
8sec. The calculation run can take anywhere from 5-45sec depending
on the settings and the application. For example, a segment with a
Thrust Formula takes longer.
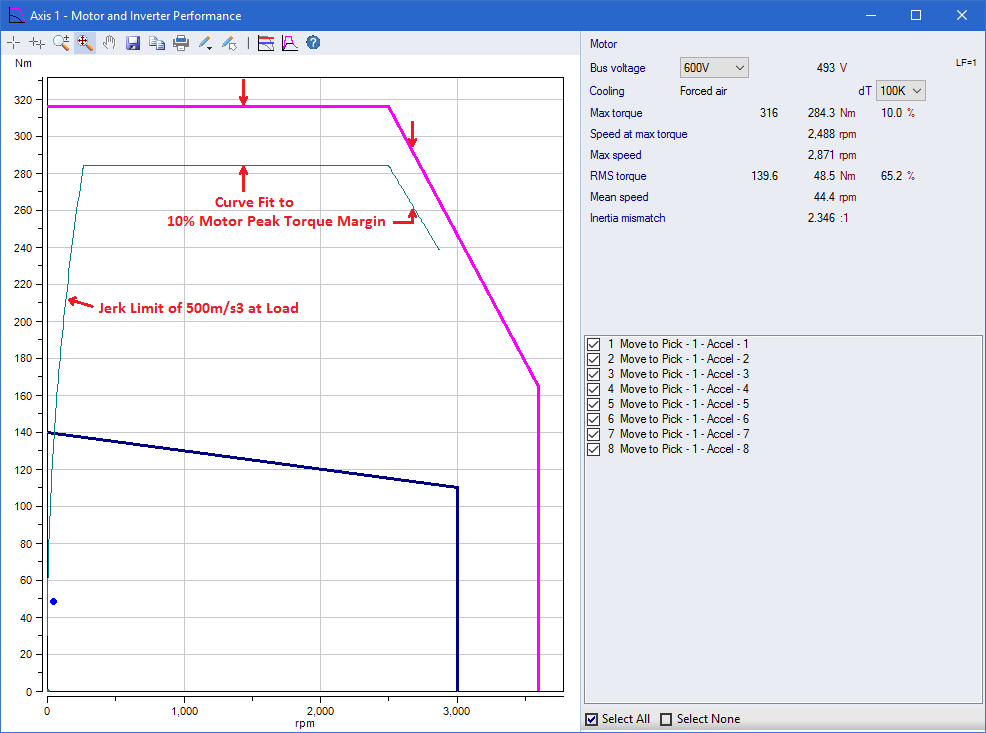
In this example, the motor rated peak torque curve is curve
fitted to 10% margin, and a jerk limited to 500m/s3 at the start of
the acceleration ramp. A 7th order spline of 8 segments is all that
is required.
Taking this further, we can also curve fit to multiple rated
curves. In the example below, in addition to the limits used in the
example above, the inverter rated peak current and infeed peak
rated power curves are also curve limited to 10%.
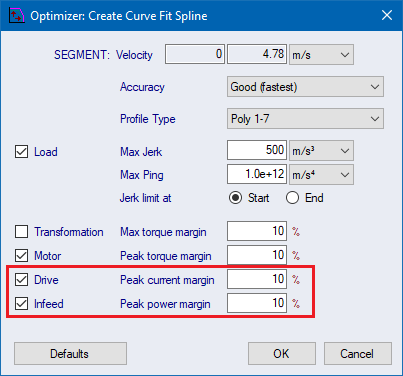
Click OK, and the calculation run takes 45sec because more
in-depth calculations are required.
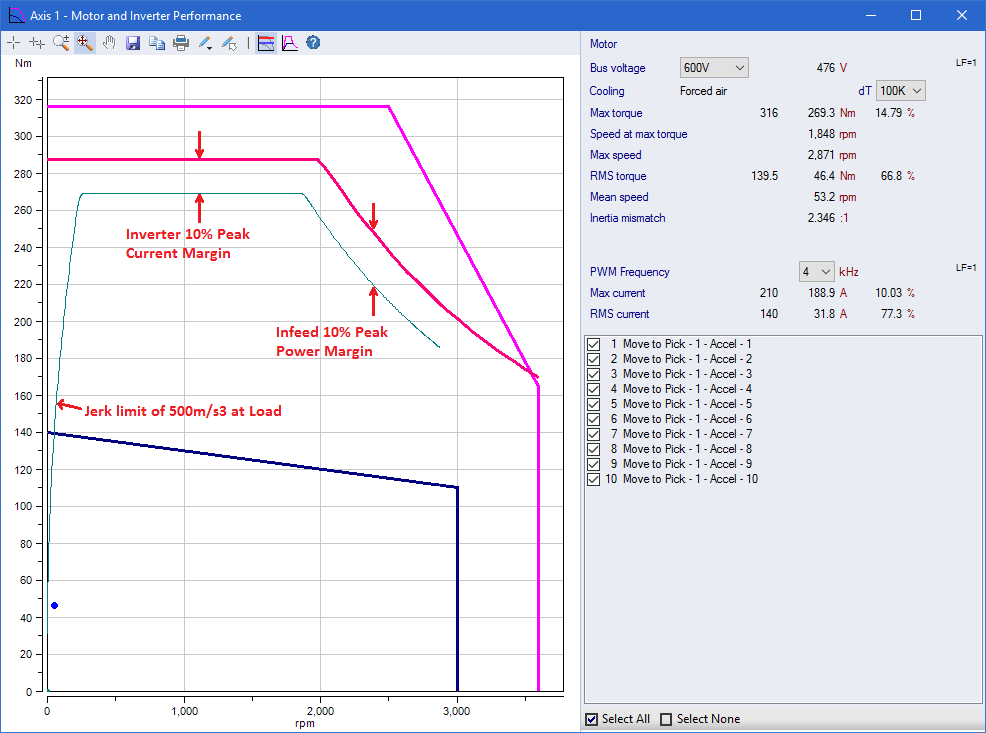
In this case, the motor peak torque margin is no longer a
limiting factor. Rather, at lower speeds, the inverter peak current
margin is the limiting factor, until about 1,875rpm where the
infeed peak power becomes the limiting factor.
What makes this curve fit so remarkable is that a spline of only
10 segments is created against multiple rated curves, all the while
providing a smooth continuous jerk profile.
Related topics
 Getting
Started: Motor Peak Torque
Getting
Started: Motor Peak Torque