Motion Profile |
 Profile
Breakdown
Profile
Breakdown
Each profile consists of a three major components:
The Acceleration and Deceleration components are subdivided further into:
Jerk
Jerk is the time rate of change of acceleration/deceleration. Typical units are m/s3 and deg/s3 for linear and rotary applications, respectively. Jerk is commonly used to minimize backlash effects, mechanical wear and tear, and to provide a smooth, stable profile, with clean positioning minimizing overshoot. Jerk is a function of the mechanical stiffness of an axis, and is difficult to know prior to properly tuning and benchmarking the actual axis performance. However, as the number of projects of similar applications grows, it becomes much easier to closely predict an appropriate jerk value for an application.
Note: Jerk limitation increases the required peak torque from the motor and may result in the need for a larger motor and drive.
|
|
|
|
Additional acceleration cannot be achieved without first increasing the jerk value S-Curving = 100% |
|
|
|
An ideal/theoretical profile Enter a jerk value of zero S-Curving = 0% |
S-Curving
Instead of specifying a specific jerk value, S-Curving is a percentage of the acceleration time, as per the following formula.
![]()
Notes:
1. S-Curving = 100% is a jerk limited
profile.
2. S-Curving = 0% is an infinite jerk
profile.
Traverse Distance & Position
Window
|
Traverse distance |
Distance less than the move distance |
|
Traverse time |
Time taken to move through the traverse distance |
|
Position window |
Distance from the target position |
|
Move time |
Time taken to reach the move stroke less the position window |
|
Position window time savings |
Time savings if the position window was set to zero |
Motion Rules (1/2, 1/3, 1/5 &
1/10 Rules)
| Rule | Accel Time | Constant Velocity Time |
Decel Time |
|---|---|---|---|
| 1/2 | T/2 | 0 | T/2 |
| 1/3 | T/3 | T/3 | T/3 |
| 1/5 | T/5 | 3T/5 | T/5 |
| 1/10 | T/10 | 4T/5 | T/10 |
where T = Move Time
Motion
Rule Charts
| 1/2 Rule |
|---|
|
|
|
t4 = 0 t1 + t2 + t3 = t5 + t6 + t7 Lowest Accel & Decel
|
| 1/3 Rule |
|
|
t1 + t2 + t3 = t4 = t5 + t6 + t7 Lowest Peak Power |
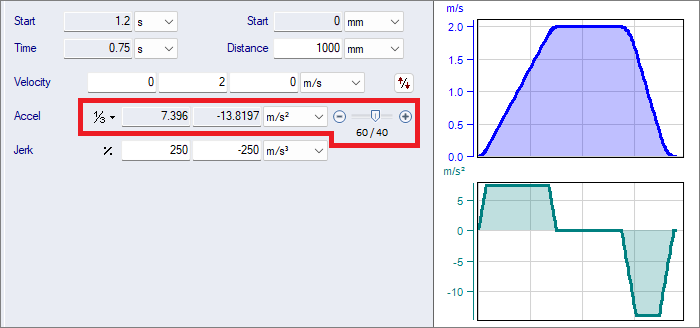
Motion Rule Skewness
Motion Rule Skewness is the asymmetry of Acceleration vs Deceleration.
The Skewness slider is visible when a Motion Rule is selected.
Below is an example of 1/3 Rule and 60/40 Skewness with Move Time T = 0.75s
Accel + Decel = 2T/3 = 0.5s
Accel = 60% x 0.5s = 0.3s
Decel = 40% x 0.5s = 0.2s
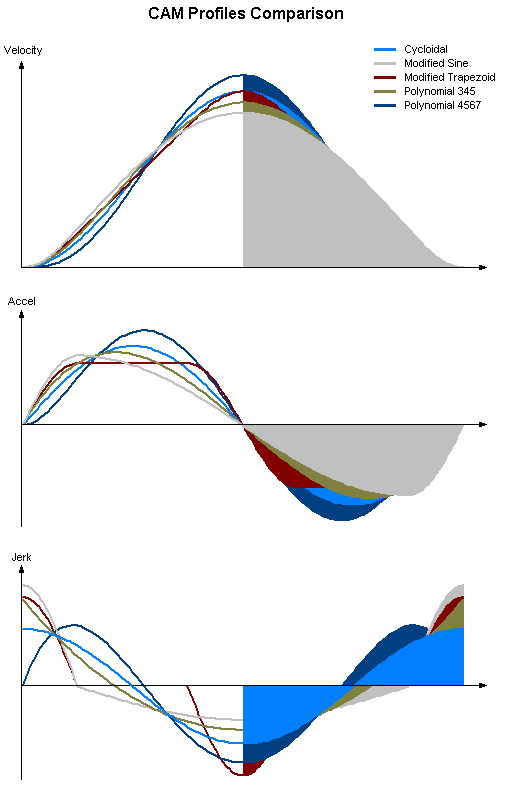
CAM Profile Types
| Type | Max Velocity | Max Accel | Max Jerk | Comments |
|---|---|---|---|---|
| Constant accel (1/2 rule, no jerk) | 2.000 d/t | 4.000 d/t² | infinite | Lowest accel, but infinite jerk |
| Trapezoid accel (1/2 rule, 50% S-curving) | 2.000 d/t | 5.333 d/t² | 42.7 d/t³ | Good balance of velocity, accel and low jerk |
| Parabolic | 1.500 d/t | 6.000 d/t² | 12.0 d/t³ | Lowest velocity, but high accel and rough jerk |
| Sinusoidal Velocity | 1.571 d/t | 4.935 d/t² | infinite | Low velocity, but infinite jerk |
| Modified Sine Accel | 1.760 d/t | 5.528 d/t² | 69.5 d/t³ | Low velocity and good accel, but higher jerk |
| Polynomial 345 | 1.875 d/t | 5.773 d/t² | 60.0 d/t³ | Good balance of velocity, accel and jerk |
| Modified Trapezoidal Accel | 2.000 d/t | 4.888 d/t² | 61.4 d/t³ | Low accel, but rough jerk |
| Cycloidal | 2.000 d/t | 6.283 d/t² | 39.5 d/t³ | Smooth accel and jerk, also low jerk |
| Sinusoidal² Accel | 2.000 d/t | 8.000 d/t² | 50.3 d/t³ | Smooth start and end jerk, but highest accel |
| Polynomial 4567 | 2.188 d/t | 7.513 d/t² | 52.5 d/t³ | Smooth jerk, but high accel and velocity |
Where:
d = distance
t = time