News
Company News
SERVOsoft® News
- SEW EURODRIVE publishes product data for new PxG® economy line
Jun 16, 2026 - SERVOsoft v4.7.110 Released!
May 17, 2026 - SERVOsoft v4.7 Released!
Feb 16, 2026 - WITTENSTEIN cyber motor
publishes servo drive
solutions in SERVOsoft
Sep 29, 2025 - SERVOsoft Cloud Released!
May 23, 2025 - Energy Storage Modules
Tutorial
Jan 12, 2025
SERVOsoft News
SERVOsoft® Up to 5x Faster Plus Many Enhancements!
Apr. 6, 2015
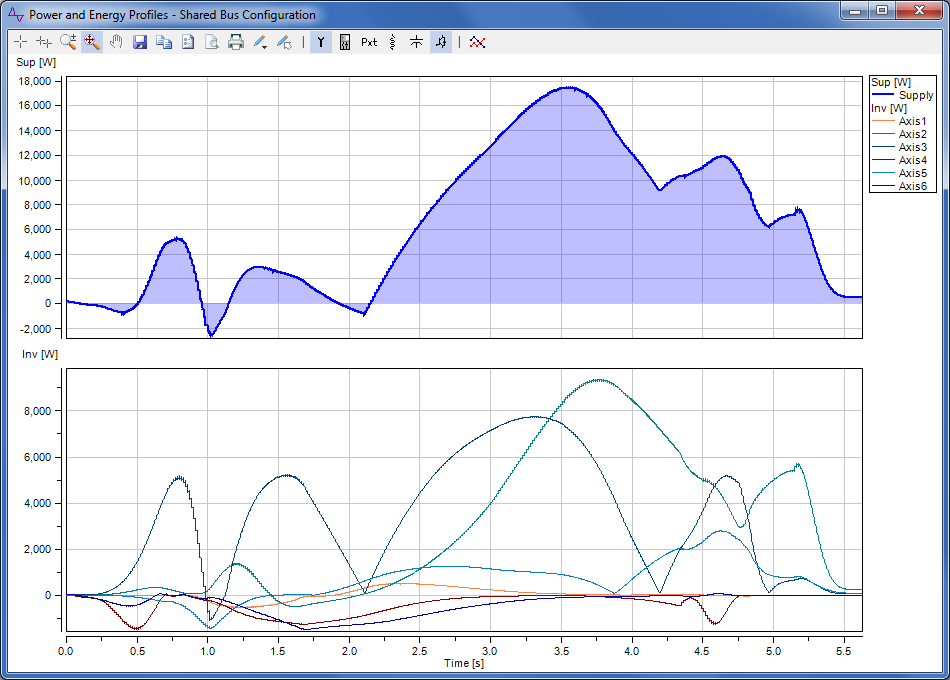
SERVOsoft® v3.3.405 is released with big performance improvements and many enhancements. Calculation performance is up to 5x faster for larger sequences (>= 100 segments) and/or projects with >= 20 axes. This improvement is in comparison to v3.3.3xx, which is already much faster than v3.2. Now projects of 40 and even 70 axes are much more responsive. The biggest area for improvement occurs for imported Sequences of Time vs Distance/Velocity (Payload & Thrust). For users who create complex sequences in external tools and then import the sequences into SERVOsoft, this improvement is for you! Why is this a big deal? It opens up opportunities for more intense modelling and optimization. One such example is the recent use of SERVOsoft® to model the energy consumption of a 6-axis articulating robot. The complex movements were created in an external tool by SIMON Modellierungen. The result of the project is a big decrease in both the peak and continuous power (ie. energy efficiency). So what's the big deal? These robots consume a lot of energy, 24 hours/day, 7 days/week, 365 days/year. A 25% reduction in energy consumption for hundreds of robots on a production line can lead to millions of dollars in savings each and every year. The project is discussed and nicely presented on SIMON Modellierungen's web site at Dancing Robots – Advanced Dynamic Energy Optimization. Additionally, substantial improvements in the language translations are included. Italian (IT) was completely revised by some of our SERVOsoft Power users in Italy, who are strong in technical knowledge and of course, also native Italian speakers. Another seemingly small but powerful enhancement is in the Drive & Motor database form, where the Infeed Bus, Inverter, Chopper and Bleeder data are displayed when selecting a Drive and Motor. Previously, only the Inverter data was shown. There are several other very solid enhancements, along with some important bug fixes in this release. Please see the Revision Log for all the details. If you have any questions or feedback, please contact us. |
 |